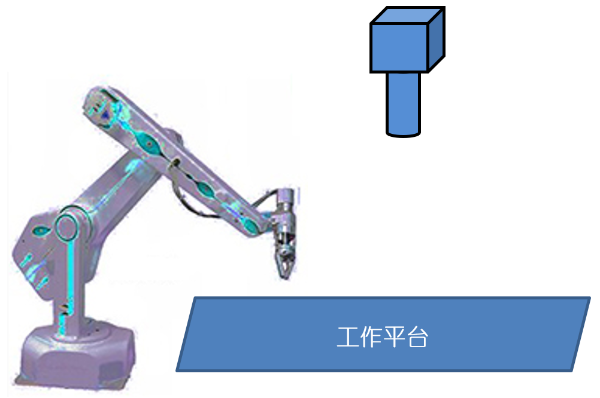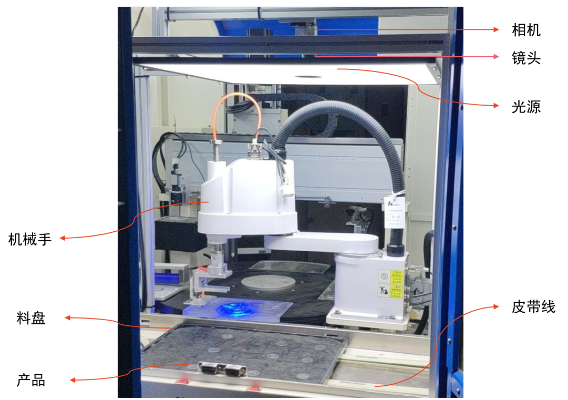
定位原理概述 系統(tǒng)架構 視覺定位系統(tǒng)采用打正向光方式,光源在機械手上方,CCD從上往下拍攝,進行圖像分析定位。相機將計算出的像素坐標轉換為機械手的物理坐標,視覺軟件與機械手進行網口通訊,將視野內物料的物理坐標發(fā)送給機械手,機械手抓取物料放在指定工位。 系統(tǒng)采用宮格標定,自定義行列數和間距及旋轉角度,通過機械手發(fā)送的當前機械坐標,視覺軟件自動計算出宮格機械坐標,視覺軟件與機械手進行網口通訊,機械手吸取物料到達指定的機械坐標,相機拍攝物料計算...
2020-12-15 15:10:40